DESCRIPTION
Description of the DexRep initiative.
Background
The field of robot hands design is still dominated by fully actuated, multi-fingered, rigid and expensive robot hands that
require advanced sensing elements and complicated control laws in order to grasp and manipulate objects or to interact with
an unstructured or dynamic environment. As a result, despite the sophisticated designs and the numerous studies that have
focused on dexterous manipulation over the last 50 years, there is no much progress in the field in terms of practical
applications and robust in-hand manipulation still remains difficult to accomplish.
Recently, a new class of adaptive robot hands was introduced. The particular hands, use underactuated mechanisms and elastic joints
in order to facilitate the extraction of stable grasps and robustify the execution of dexterous, in-hand manipulation tasks.
The most impressive attribute of these hands is their ability to grasp objects even under significant object pose or
environmental uncertainties and for this reason most researchers choose to control these hands in an open-loop, mostly "on-off" fashion.
However, adaptive hands have also certain limitations and disadvantages. The use of compliant elements in the robot hand structure and
the kinematic constraints imposed by the underactuation, make modelling of adaptive hands particularly difficult and challenging.
Thus, extracting a representative set of manipulation primitives that simplify the control of these hands, is of paramount importance.
Methodology Overview
In order to automate the extraction of dexterous manipulation primitives we used a combination of constrained optimization,
analytical and learning methods. More precisely, a constrained optimization scheme is employed by a simulation module in order to explore the feasible
manipulation paths for each robot hand design and to provide good initial estimates. Based on these estimates, an automated experimental setup gathers data
of numerous manipulation trials without supervision, detecting unstable grasps or the loss of a particular grasp. The raw manipulation data are stored into
a database and a clustering method is used to group together similar strategies. The feature variables used are: i) the object pose (3 variables for 2D tasks
and 6 variables for 3D tasks) and ii) the equivalent motor positions at the beginning and the end of the manipulation task. The extracted groups of manipulation
strategies are projected to a lower dimensional manifold using a dimensionality reduction technique (Principal Components Analysis).
More details on the automated extraction of the presented dexterous manipulation models, can be found in the following publication:
M. Liarokapis and A. M. Dollar, "Combining Analytical Modelling and Learning to Simplify Dexterous Manipulation with Adaptive Hands,"
IEEE Transactions on Automation Science and Engineering, 2018 (under review).
Experimental Setup
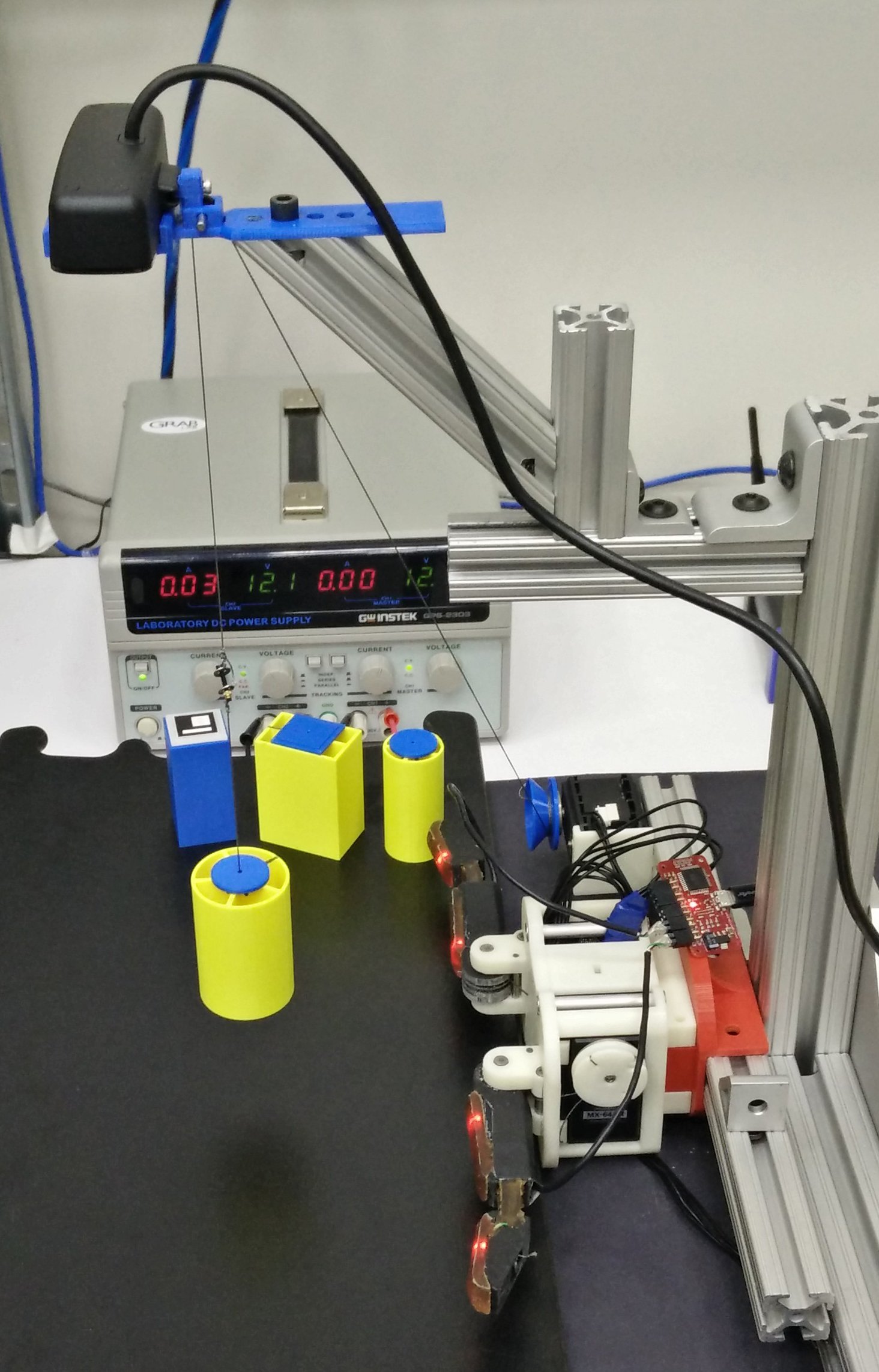
In order to automate the data collection procedure for the planar manipulation tasks,
we used an experimental setup that consists of a steady structure with a webcamera attached at the top,
a motorised mechanism that resets the object pose to a initial configuration and a hand base for attaching the
examined hand. The following picture depicts the experimental setup for planar manipulation tasks.
For 3D manipulation tasks, the steady base of the hand is substituted by the Barrett WAM
robotic manipulator. The WAM has the examined hand attached at its end-effector and prepositions
the hand so as to extract a representative set of manipulation primitives. The Barrett WAM with the
FG gripper attached is depicted in the following picture.

|
Future Directions
Regarding future directions, we plan to extend our analysis for complex objects, to include more hands,
to take into consideration the effect of non-symmetric initial grasps and object pose uncertainties
on the models extraction, to further automate their identification, annotation and extraction
for more complex robot hands and to consider, compare and evaluate different types of clustering
and dimensionality reduction techniques. We plan also to provide the ranges of motion as well as
grasping and manipulation force profiles for every hand and object combination.
The DexRep will serve as an open repository for all these efforts.