Research
Our research spans robotic hands, exoskeletons, human-robot skill transfer, dexterous manipulation, aerial robotics, and teleoperation.
Research Areas
Robot Learning and Human to Robot Skill Transfer
Advanced learning methodologies focusing on foundation robot models, behavior cloning / imitation learning, gamification, and crowd-sourcing for teaching robots how to be more dexterous.
Robot Grasping and Dexterous Manipulation
Techniques for executing complex tasks in dynamic, unstructured environments.
Robotic and Prosthetic Arms, Grippers and Hands
Design, analysis, modelling, and development of a new family of compliant, under-actuated robotic and prosthetic arms, grippers, and hands.
Hybrid Wearable Robotic Exoskeletons
Development of soft robotic exoskeleton gloves for rehabilitation and human augmentation.
Muscle Machine Interfaces
Advanced learning systems that enable intuitive control of robotic and bionic devices.
Evaluation of Human and Robot Dexterity
Benchmarking and assessment of dexterity capabilities.
Robotic Vehicles
Development of aerial airships, reconfigurable drones, and all-terrain platforms.
Teleoperation and Telemanipulation
Real-time control systems incorporating AR and VR technologies.
Featured Projects
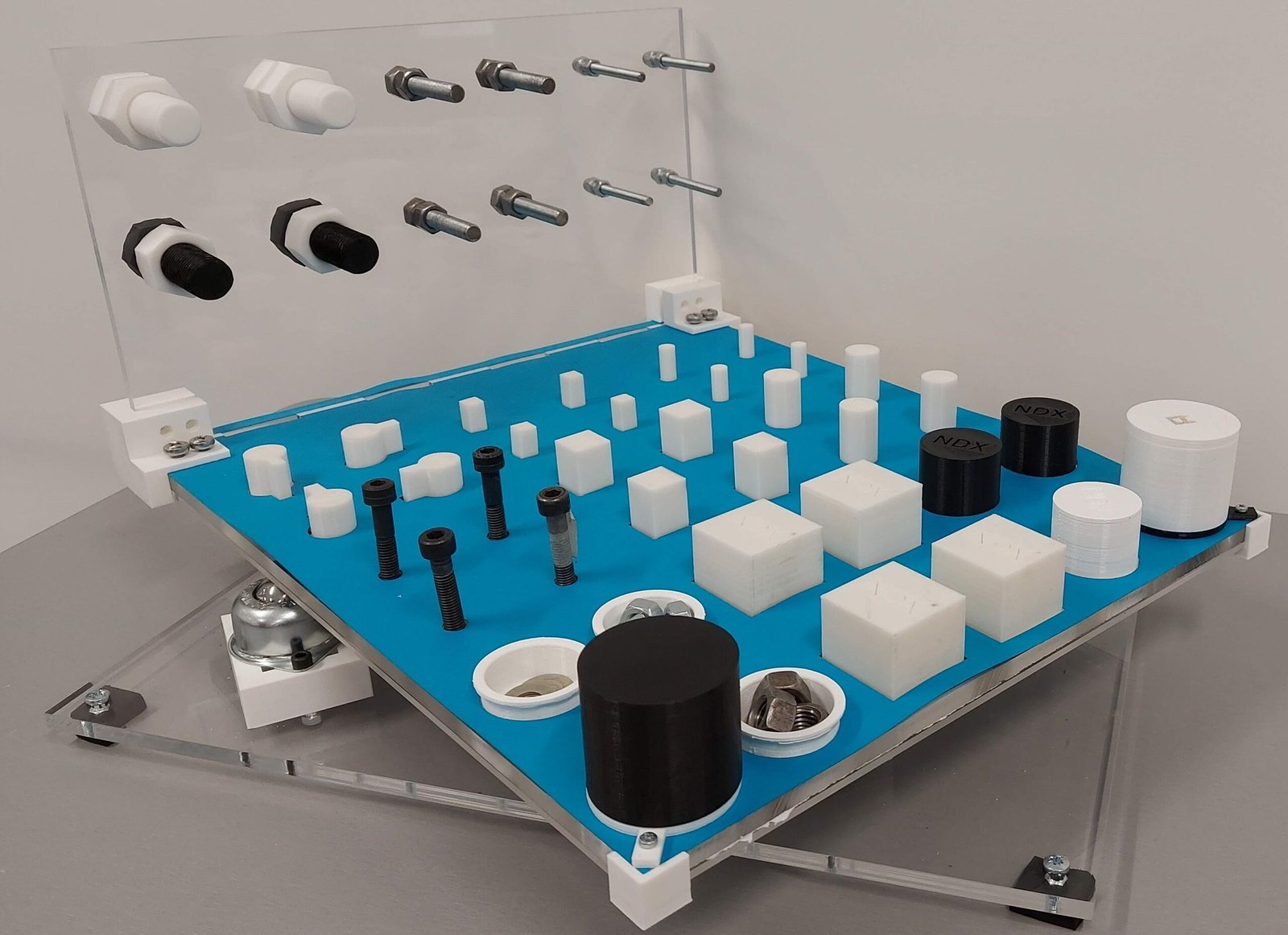
An Open-Source Dexterity Test

Adaptive Exoskeleton Gloves
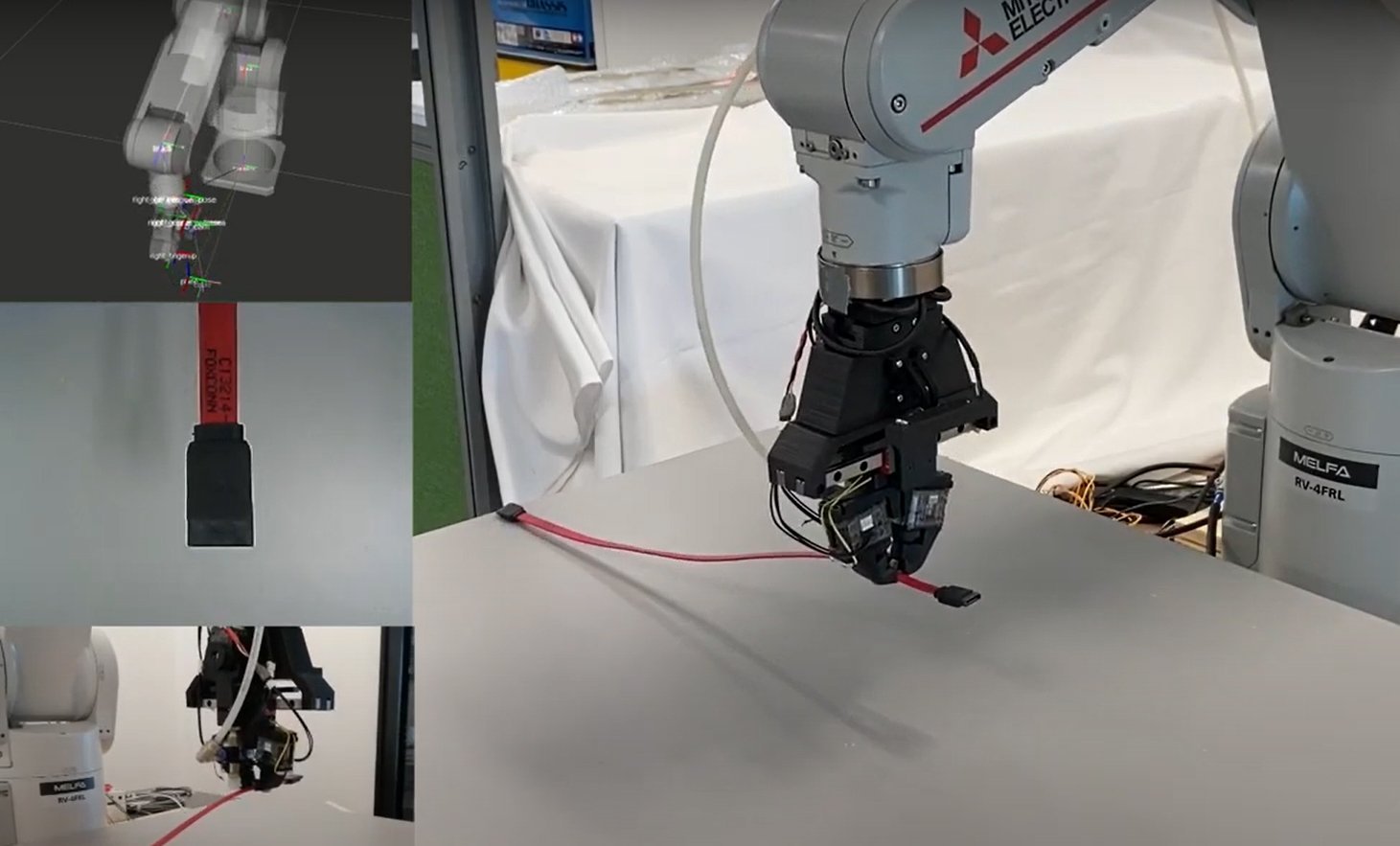
Flexible Cable Manipulation Gripper

Ultra Fast Aerial Grasping & Perching

Affordances Based Telemanipulation
